
Smart parking system using ultrasonic sensor ,ir sensor, Servo using wokwi simulations ,
OBJECTIVE
The objective of this project is to detect car presence in parking slots and display whether each slot is free or occupied on an LCD screen.
MODULES REQUIRED
- Arduino uno
- Ultrasonic sensor
- Red led
- Green led
- Breadboard
- Servo
- Resistor 220ohm
- IR receiver
- Potentiometer
SCHEMATIC DIAGRAM
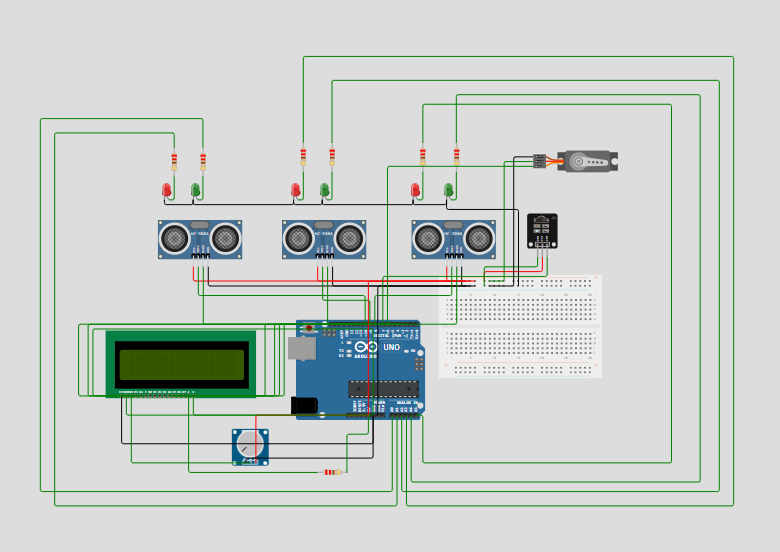
SCHEMATIC CONNECTION
Power Distribution:
LCD 16x2 Display:
Potentiometer (for LCD Contrast):
Ultrasonic Sensors (for 3 Parking Slots):
Sensor 1 (Left):
- VCC to the 5V rail..
- GND to the GND rail.
- Trig & Echo pins are connected together and then to Arduino Digital Pin 10.
Sensor 2 (Middle):
- VCC to the 5V rail.
- GND to the GND rail.
- Trig & Echo pins are connected together and then to Arduino Digital Pin 9.
Sensor 3 (Right):
- VCC to the 5V rail.
- GND to the GND rail.
- Trig & Echo pins are connected together and then to Arduino Digital Pin 8.
Indicator LEDs (for 3 Parking Slots)
Slot 1 LEDs:
- Green LED: Anode (+) to a 220Ω resistor, other end of the resistor to Arduino Analog Pin A0. Cathode (-) to GND.
- Red LED: Anode (+) to a 220Ω resistor, other end of the resistor to Arduino Analog Pin A1. Cathode (-) to GND
Slot 2 LEDs:
- Green LED: Anode (+) to a 220Ω resistor, other end of the resistor to Arduino Analog Pin A2. Cathode (-) to GND.
- Red LED: Anode (+) to a 220Ω resistor, other end of the resistor to Arduino Analog Pin A3. Cathode (-) to GND.
Slot 3 LEDs:
- Green LED: Anode (+) to a 220Ω resistor, other end of the resistor to Arduino Analog Pin A4. Cathode (-) to GND.
- Red LED: Anode (+) to a 220Ω resistor, other end of the resistor to Arduino Analog Pin A5. Cathode (-) to GND
Servo Motor (Gate Control)
- Signal wire (Orange/Yellow) to Arduino Digital Pin 6.
- VCC wire (Red) to the 5V rail.
- GND wire (Brown/Black) to the GND rail.
IR Sensor Vehicle Detection at Entrance
- OUT (Signal) pin to Arduino Digital Pin 7.
- VCC pin to the 5V rail.
- GND pin to the GND rail.
To begin your project, click this template link:
ARDUINO CODE
#include (LiquidCrystal.h)
#include (Servo.h)
LiquidCrystal lcd(12, 11, 5, 4, 3, 2);
#define t1 10
#define t2 9
#define t3 8
#define IR_SENSOR_PIN 7
#define SERVO_PIN 6
#define GREEN_LED1 A0
#define GREEN_LED2 A2
#define GREEN_LED3 A4
#define RED_LED1 A1
#define RED_LED2 A3
#define RED_LED3 A5
Servo servoMotor;
int distanceThreshold = 150;
void setup() {
lcd.begin(16,2);
lcd.setCursor(0,0);
pinMode(IR_SENSOR_PIN, INPUT_PULLUP);
pinMode(GREEN_LED1, OUTPUT);
pinMode(GREEN_LED2, OUTPUT);
pinMode(GREEN_LED3, OUTPUT);
pinMode(RED_LED1, OUTPUT);
pinMode(RED_LED2, OUTPUT);
pinMode(RED_LED3, OUTPUT);
servoMotor.attach(SERVO_PIN);
Serial.begin (9600);
}
long readDistance(int triggerPin, int echoPin) {
pinMode(triggerPin, OUTPUT);
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
pinMode(echoPin, INPUT);
return pulseIn(echoPin, HIGH);
}
void handleLEDs(float distance, int greenLedPin, int redLedPin) {
if (distance >= distanceThreshold){
digitalWrite(greenLedPin, HIGH);
digitalWrite(redLedPin, LOW);
Serial.println("Empty slot!!");
} else {
digitalWrite(redLedPin, HIGH);
digitalWrite(greenLedPin, LOW);
Serial.println("Car is parked");
}
}
void loop() {
//... same code as above ...
float d1 = 0.01723 * readDistance(t1, t1);
float d2 = 0.01723 * readDistance(t2, t2);
float d3 = 0.01723 * readDistance(t3, t3);
Serial.println("d1 = " + String(d1) + "cm");
Serial.println("d2 = " + String(d2) + "cm");
Serial.println("d3 = " + String(d3) + "cm");
if (digitalRead(IR_SENSOR_PIN) == LOW) { // Vehicle detected by IR sensor
if (d1 > 100 || d2 > 100 || d3 > 100) {
servoMotor.write(90); // Assuming 90 degrees opens the gate
delay(500);
servoMotor.write(0); // Assuming 0 degrees closes the gate after some time
delay(500);
} else {
// Do nothing or maybe sound a buzzer to indicate parking full
}
}
// Handle LEDs based on the distance readings
handleLEDs(d1, GREEN_LED1, RED_LED1);
handleLEDs(d2, GREEN_LED2, RED_LED2);
handleLEDs(d3, GREEN_LED3, RED_LED3);
if (d1>100 & d2>100 & d3>100){
lcd.setCursor(0,0);
lcd.print("3 Slots Free");
lcd.setCursor(0,1);
lcd.print("Slot 1 2 3 Free");
delay(500);
}
else if((d1>100 & d2>100)|(d2>100 & d3>100)|(d3>100 & d1>100))
{
lcd.setCursor(0,0);
lcd.print("2 Slots Free");
lcd.setCursor(0,1);
if(d1>100 & d2>100)
lcd.print("Slot 1 & 2 Free");
else if(d1>100 & d3>100)
lcd.print("Slot 1 & 3 Free");
else
lcd.print("Slot 2 & 3 Free");
delay(500);
}
else if(d1<100 & d2<100 & d3<100)
{
lcd.setCursor(0,0);
lcd.print("No Slot Free");
lcd.setCursor(0,1);
lcd.print("Parking Full");
delay(500);
}
else if((d1<100 & d2<100)|(d2<100 & d3<100)|(d3<100 & d1<100))
{
lcd.setCursor(0,0);
lcd.print("1 Slot Free");
lcd.setCursor(0,1);
if(d1>100)
lcd.print("Slot 1 is Free");
else if (d2>100)
lcd.print("Slot 2 is Free");
else
lcd.print("Slot 3 is Free");
delay(500);
}
delay(100);
}